Inductive resolver for e-motor, e-brake and e-steering
The flexibility and scalability of Melexis’ inductive resolver sensor make it the most suited solution for e-machine rotor position sensing.
The electrification of the car has started and the demand for BEV is increasing at a fast pace.. Every single one of these current and future vehicles depends on a cost-effective and high-performance electric traction motor (an e-machine). And every single e-machine in turn needs accurate, versatile and cost-effective rotor position sensors.
This sensor signal is required in synchronous electric motors for driving the e-machine torque control (Figure 1). An error in the synchronization of these signals will immediately lower the overall performance of the system, and could lead to a safety issue.
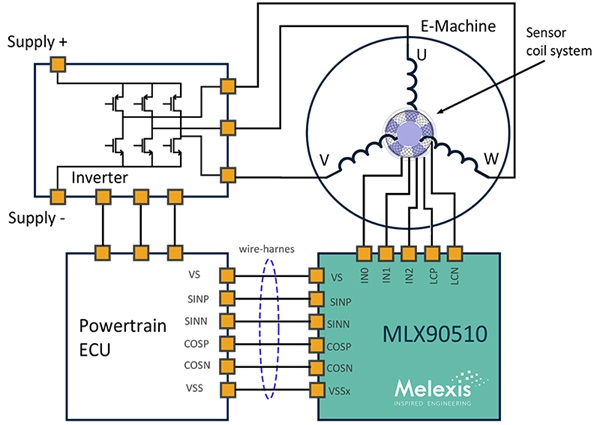
Figure 1: e-motor system view.
Types of rotor position sensors
High-speed rotor position sensors are generally one of three types: Variable Reluctance (VR) resolver, magnetic resolver, or inductive resolver (Figure 2).
Variable Reluctance (VR) resolver
The VR resolver is currently the most commonly used position sensor in traction motors. It consists of a ferromagnetic rotor and a stator with several secondary coils. VR resolvers have a long track record in e-machine position sensing applications, and are advantageous in harsh environments due to their robustness.
Magnetic resolver
A magnetic resolver uses Hall effect sensors which immediately lead to overall cost advantages. They also offer compactness while maintaining the other properties of VR resolvers.
Inductive resolver
An inductive resolver combines high accuracy with a wide speed range, immunity against stray magnetic fields, and ASIL D Automotive Safety Integrity Level classification. At the same time, it reduces the overall cost of an electric drivetrain compared to VR resolver technology.
| Parameter / Technology | VR | Inductive | Hall effect |
| Accuracy | high | high | medium |
| RPM | high | high | medium |
| Stray field immunity (ISO 11452-8) | yes | yes | limited |
| System cost | high | medium | medium |
| Output | analog | analog /digital | analog /digital |
| Interface | additional IC | integrated | integrated |
| Size | medium | medium | small |
| Weight | high | medium | low |
| ASIL (ISO 26262) | not supported | ASIL C (D) | ASIL B |
Figure 2: Comparison of high-speed resolver technologies.
How does an inductive resolver work?
An inductive resolver measures the position of a metallic target which is placed in front of a set of inductive coils. A typical configuration is depicted in Figure 3.
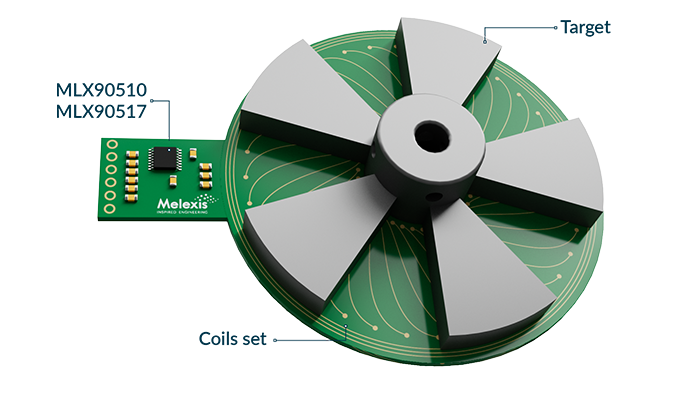
Figure 3: Example of an inductive resolver board
A metallic target is attached to the motor rotor. It consists of a number of lobes matching the number of pole pairs of the motor. A coil set, composed of a transmission (Tx) coil and receiving (Rx) coils, is fixed to the motor stator and is generally manufactured directly within the PCB. The coils are in turn connected to the integrated circuit interface (Figure 4).
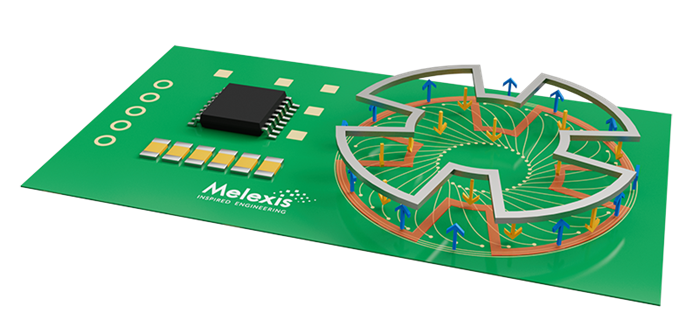
Figure 4: Basic principle of an inductive sensor.
In practice, an inductive sensor works as follows:
-
The Tx coil, controlled by the sensor IC, is excited in order to produce an AC magnetic field
-
The target rotates together with the rotor of the motor and reflects the magnetic field towards the coils, depending on its position
-
The Rx coils receive the field reflected by the target and generate a set of three AC signals (3-phase coils design)
-
The position sensor interface IC converts the input signals from the Rx coils into differential Sine/Cosine (base band) output signals. The signals are used to communicate with the Electronic Control Unit. The only computation the ECU has to perform is an angle calculation from the Sine/Cosine signals by an arc tangent operation.
For an in-depth technical description, discover more in our white paper.
Designing a module with an inductive resolver
There are four main areas that must be considered when designing a module using an inductive resolver. These are the coil system, the target, the IC (signal processing) and the PCB (Figure 5).
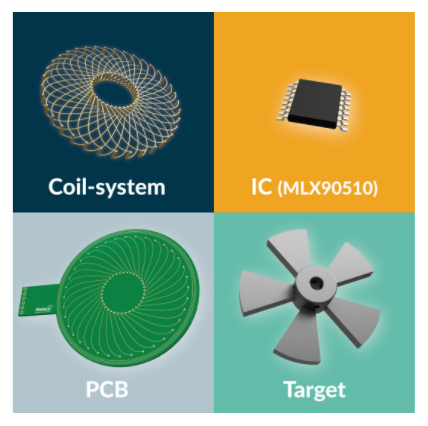
Figure 5: The four main design areas of an inductive resolver.
The coil system
The coils are the transducer of the system, equivalent to Hall plates for a magnetic system. Inductive sensors offer a degree of design flexibility when it comes to the design of the coils.
In regard to coil design and design scalability, as the transducer (the coil set) is not integrated in the chip it can be tailored to the needs of the application. The sensor periodicity can be adjusted according to the number of pole pairs of the motor.
Some examples of coil design with variable periodicity are shown in Figure 6. Variable periodicity allows the sensor range to be matched with the motor electrical period, thus maximizing the sensor accuracy. There is no theoretical maximum number of pole pairs an inductive sensor can accommodate. Limitations mainly come from space and PCB design rule constraints.
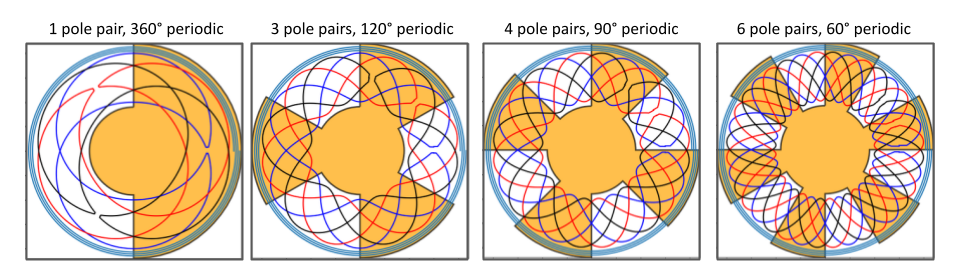
Figure 6: Examples of inductive sensors with different periodicity.
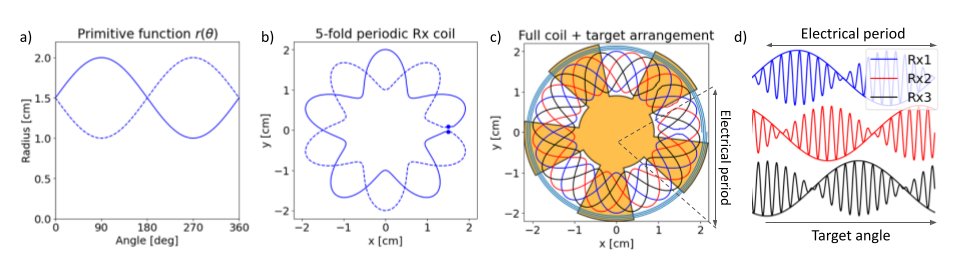
Figure 7: Coil design flow of a 5 pole pairs, 4 cm diameter inductive sensor.
a) primitive function. b) individual Rx coil pattern.
c) Full coil set plus target d) Rx voltages over an electrical period.
Figure 7 illustrates schematically how the coil set is obtained. The Rx coils are defined from a sinusoidal primitive function 𝑟(𝜃)=𝑅0+Δ𝑅sin(𝜃) and its complementary one 𝑟′(𝜃)=𝑅0−Δ𝑅sin(𝜃) (Figure 7a). The Rx coil pattern is then obtained by means of a polar coordinate transformation, with the intention to fit N periods in a full turn, N being the number of pole pairs of the motor (Figure 7b):
The full coil set is then completed by adding two other Rx coils shifted by 120°/N, a circular Tx coil around the Rx coils and a target (Figure 7c). This configuration will provide a 3-phase signal set as sketched in Figure 7d.
The target
The target is placed on the rotor element and can be adjusted to the number of pair poles of the motor. Energy from the Tx coils induce eddy currents in the target, which in turn generate a field that is sent back and received by the Rx coils.
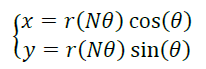
Eddy currents are loops of electrical current induced within conductors by a changing magnetic field in the conductor according to Faraday's law of induction. Eddy currents flow in closed loops within conductors (Figure 8), in planes perpendicular to the magnetic field.
Figure 8: Eddy currents in the target can be viewed as a single current, or decomposed into separate current loops.
There are actually similarities between inductive and magnetic resolvers (Figure 9). For example a trilobe target corresponds to a six-pole magnet.
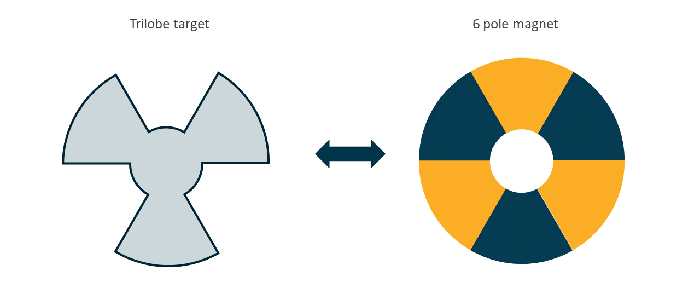
Figure 9: A three-lobed inductive target can be viewed as a six-pole magnet.
The receiving coils associated with the inductive target are similarly equivalent to the Hall plates of a magnetic system (Figure 10).
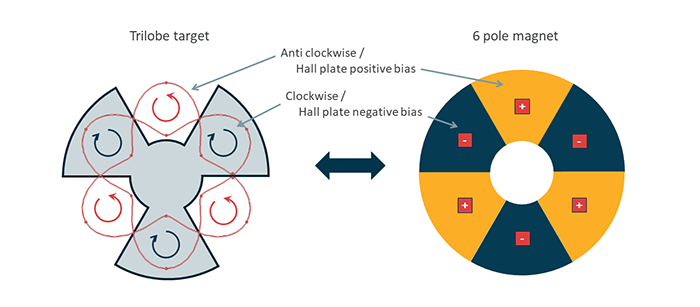
Figure 10: The Rx clockwise / anti-clockwise of an inductive resolver corresponds to the Hall plates positive / negative biasing of a magnetic resolver.
The IC (signal processing)
With an inductive resolver, the signal processing is directly integrated inside the module (Figure 11). The Rx signals are processed by the integrated interface IC and provided to the ECU in Sine/Cosine format. Signal processing covers common-mode removal, offset compensation, digital angle calculation, linearization, and propagation delay compensation.
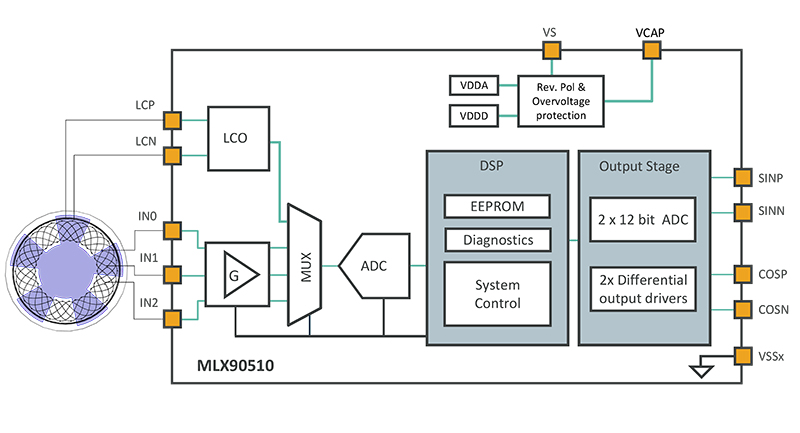
Figure 11: Analog conditioning and Digital Signal Processing (DSP) are performed by the IC.
The PCB
Neither special PCB design tool nor special PCB technology are required for the coil design.
What makes a good rotor position sensor?
To ensure accurate and reliable operation, a rotor position sensor should have the following characteristics:
-
Reliable and accurate position sensing at speeds beyond 200,000 e-rpm (electrical rpm).
-
Highly accurate position sensing to ensure maximum efficiency, optimal torque control, and low torque variation.
-
Immunity against stray magnetic fields.
-
Scalable and flexible design for different motor designs and sensor placements.
-
Light weight and cost efficient.
-
High automotive Safety Integrity Level up to ASIL D.
MLX90510 & MLX90517 inductive resolver
The MLX90510 (MLX90517) inductive resolver from Melexis is an inductive position sensor IC used for absolute rotary motion/position sensing in safety critical automotive applications. Its main specifications lead to specific benefits for e-machine types of applications:
3-phase coil design
Melexis uses a 3-phase (triphase) coil design although it may be more intuitive to go for quadrature phase coil design as it is the case for magnetic systems (Figure 12).
A triphase approach does not bring any extra immunity to the error sources we are familiar with (offset, mismatch, orthogonality…). However, there is an advantage because inductive signals are not as sinusoidal as Hall signals. A 3-phase approach simplifies linearity optimization by automatically filtering out some nonidealities (e.g. the rejection of even harmonics). For a more in-depth explanation of 3-phase coil design, including the complete theory and validations, read our white paper.
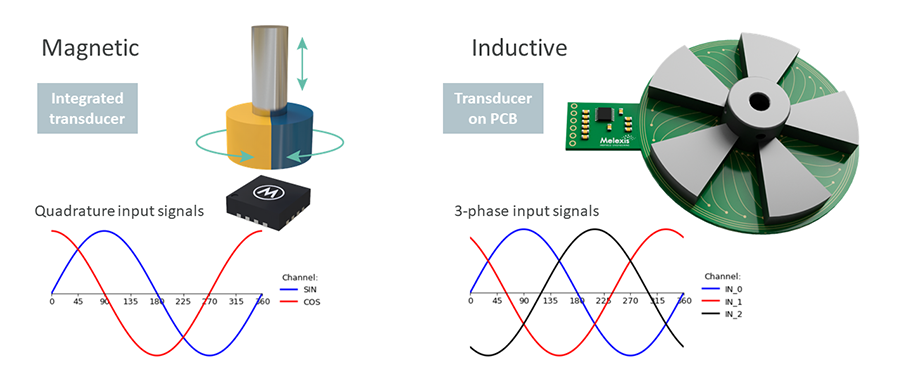
Figure 12: Magnetic quadrature input signals versus Inductive triphase input signals.
High accuracy
The MLX90510 & MLX90517 allow for high accuracy and high automotive safety integrity levels thanks to the use of an innovative digital-based architecture.
-
The system propagation delay is <+/- 120 ns over the full operating range. (MLX90510 only)
-
High accuracy < +/- 0.36° el up to 240,000 electrical rpm over the full operating range.
Mechanical mounting position flexibility
The coil system can be printed on a PCB and can be easily adapted to different types of e-machines. Moreover, it allows flexible positioning on the shaft. There are three main classes for the coil system topology (Figure 13):
-
End of shaft: small size, low cost, robust against mechanical tolerances
-
Through shaft: medium size, medium cost, robust against mechanical tolerances
-
Side of shaft: small size at large diameter, low cost, sensitive to mechanical tolerances
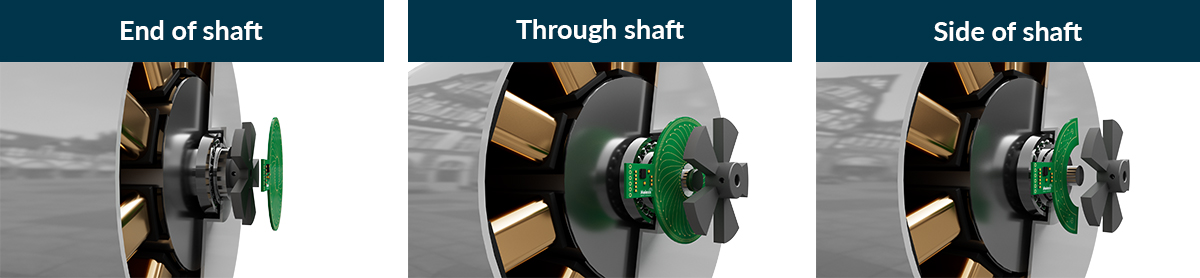
Figure 13: Three positions of shaft positioning of coil system.
Improved cost structure
An example of cost reduction is the fact that this inductive position sensor operates with high frequencies without interfering with the switching frequency of the high power inverter. This means that no expensive shielding is necessary.
Improved linearity
The use of a 3-phase coil set rather than a more classical Sine/Cosine pair improves linearity by filtering some unwanted harmonics in the Rx signals. In addition, the MLX90510 offers 16-point linearization to mitigate residual error sources from mechanical tolerances and other sources.
Safety
The MLX90510 & MLX90517 ICs are compliant to ISO 26262 ASIL C (D), supporting system integration up to ASIL D rate.
Robustness
-
Differential Sine and Cosine analog output independent from analog input voltage amplitude variations due to air gap variations.
-
Decoupling between the input and output enables unprecedented EMC performances. It also ensures stable output amplitudes independently from the airgap related input signal strength.
-
Wide operating supply voltage range, including overvoltage and reverse-polarity protection: -24 V to +24 V
-
Magnetic stray field immunity for DC and AC stray fields (ISO 11452-8).
-
Automotive AEC-Q100 qualified
-
Ambient operating temperatures range from -40°C to 160°C.
Application areas
The MLX90510 & MLX90517 are suitable for a wide range of applications in electric vehicles (Figure 14).
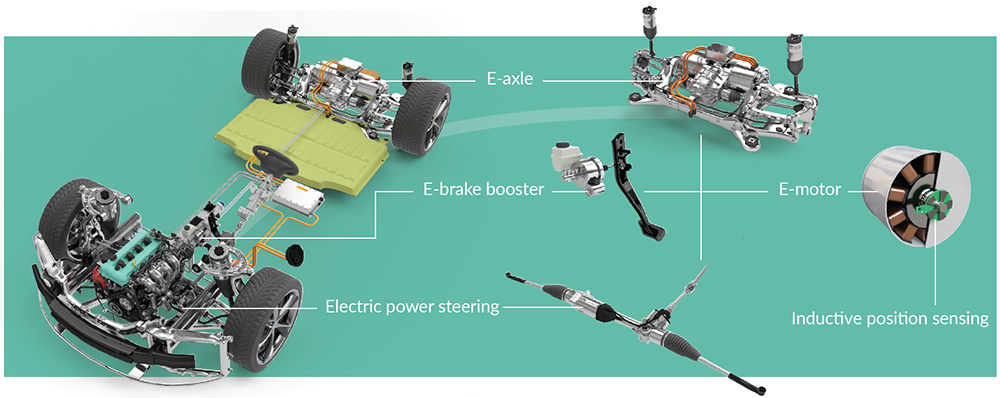
Figure 14: Besides electric motors, applications include power steering, electric brake boosters and electric axles.


