用于电机控制反馈回路的传感器
位置传感器芯片对电机驱动器的作用有哪些?
在本期技术洞见中,我们将为您介绍用于电机换向和/或定位的 Melexis 磁性位置传感器芯片。探索锁存器/开关、线性霍尔传感器或角度编码器等磁性解决方案。如需了解技术概念,请参见完整应用笔记电机控制反馈回路应用笔记(第 5 章).
用于电机驱动器的位置传感器
电机驱动是一个复杂的领域,应用于众多应用案例。有些电机驱动器在不配备位置传感器(无传感器)的情况下可以完美运行。既然如此,为何还要额外增加组件?下面我们先区分一下位置传感器的两个作用。
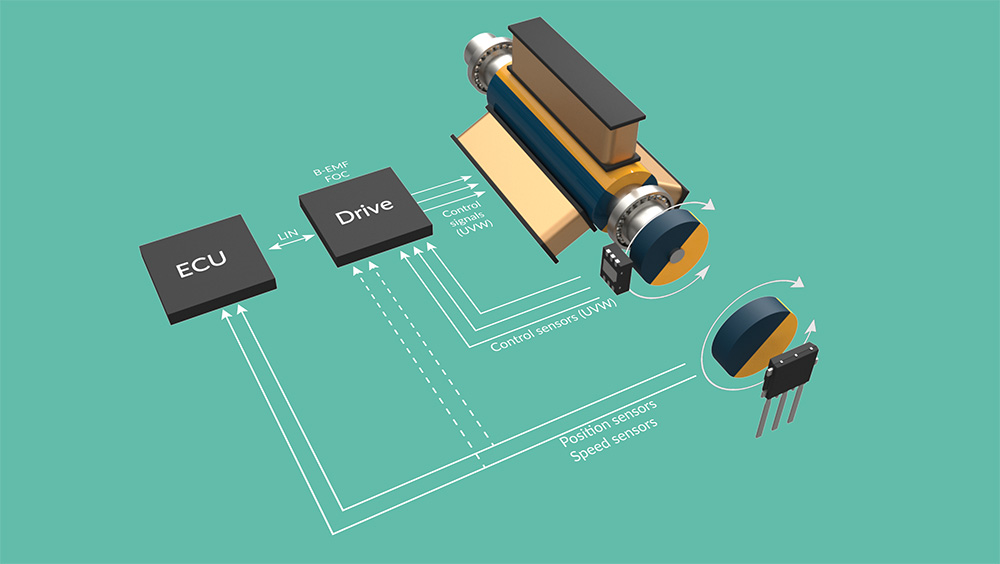
图 1:实现电机换向和应用定位的通用结构单元和路径
电机控制可以具有多个反馈回路:一个用于电机换向,一个用于定位。这些控制回路不一定使用相同的位置传感器,因为优化系统和BOM需要不同的特性。位置传感器可以在以下方面改进系统的控制:位置、扭矩或速度。
位置控制
- 在启动和整个运行过程中启用已知的(安全)位置
- 使用步进电机时避免漏步
转矩控制
- 可实现低速和低噪音运行,尤其适用于大型电机,如泵
速度控制
- 启动可靠
- 低速驱动
- 可处理高动态负载
图 2:位置传感器在电机驱动应用中的优势
电机换向
对于多种类型的电机,位置传感器可以用作电机换向控制回路的组件。
电机控制算法可决定通过线圈的电流大小及其时序。施加磁场的角度必须与转子的磁场方向正交,以最大程度提高效率。
其概念已在应用笔记(第 5 章)中详细说明,但请注意,电机控制算法的类型与电机设计和传感器类型相关。例如,无刷电机可以在梯形控制、正弦控制和磁场定向控制模式下运行:
- 梯形控制为基本模式,可根据锁存器/开关的输出确定转子的位置。它可以满足无刷直流电机 (BLDC) 的需求,实现高速换向,但可能出现意外转矩波动。想象一辆加速不平稳的电动车。
- 正弦控制或磁场定向控制表现更出色,但它们依赖于转子角位置的精确性(高分辨率角度)。角位置越精确,效率越高,在某些应用中会体表现出更高的安全性。这些控制算法也适用于永磁同步电机 (PMSM)。
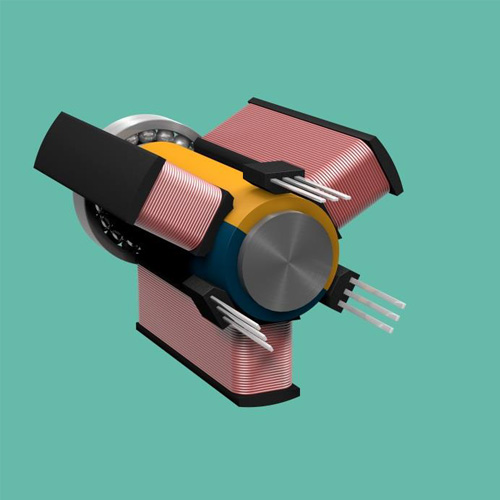
图 3:锁存器和线性霍尔传感器原理

图 4:角度编码器原理
应用定位
位置传感器可用于应用定位。以一个关键的智能阀为例。位置传感器可确保阀门位置正确(不依赖电机位置)。另一个例子是可精确定位机械臂上的关节的伺服电机。
在这个例子中,电机定位所用的传感器可以是用于电机换向的传感器。如果转子轴的位置和电机的输出轴完全关联,则应为上述情况。但并非总是如此。在某些情况下,内部齿轮箱会将高速/低转矩转子转换为低速/高转矩输出轴。然后可能需要在输出传感器上额外配备一个低速传感器。

Melexis 产品
用于电机换向的传感器芯片
在本章中,我们会详细介绍 3用于电机换向的3种霍尔产品:锁存器/开关芯片、线性霍尔传感器芯片和角度编码器芯片。
| 电机换向(高速) | 低分辨率 | 高分辨率 |
| 多芯片 | 锁存器/开关 | 线性霍尔传感器 |
| 单芯片(或双芯片以实现冗余) | 角度编码器 |
采用锁存器/开关控制电机换向
锁存器/开关产品以多芯片配置放置在定子中。它们非常适合直流无刷电机的梯形控制:使用 3 颗芯片,每相 1 颗。
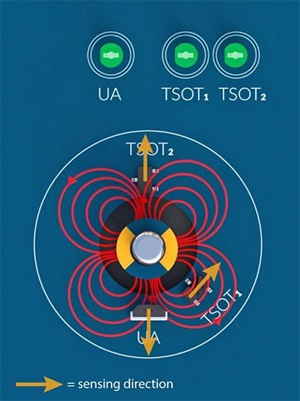
图 5:
侧向或垂直感应
Melexis 提供一系列具有预编程或可编程固定参数的霍尔效应锁存器芯片。除了可感应垂直施加于芯片表面的磁感应强度的传统传感器之外,Melexis 还推出了可感应侧向磁感应强度的锁存器芯片。此功能大大提高了传感器定位相对于磁体(转子或感应磁体)定位的灵活性。传感器采用单芯片 TSOT-3L 或 TO92-3L 封装。Melexis 还推出了首款支持 ASIL-B 的锁存器/开关芯片。
了解详细信息

图 6:
侧向/X 轴

图 7:
垂直/Z 轴
采用线性霍尔传感器控电机换向
线性霍尔效应传感器可用于替代锁存型霍尔传感器。多个传感器正交式使用可提供具有高角度分辨率的转子绝对角度。可根据它们的模拟输出通过专用算法计算出更准确的转子位置。因此,它们不仅适用于检测电机换向点,还适用于精确的位置控制。
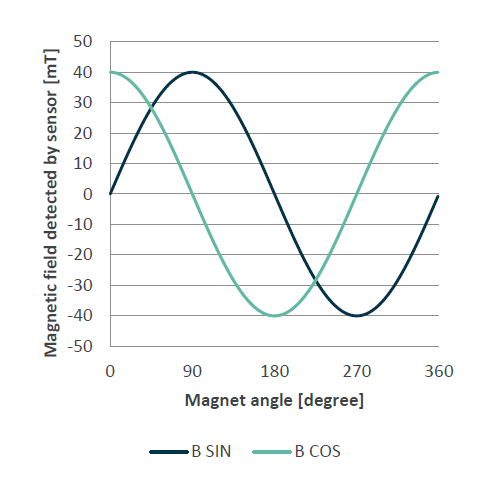
以 90° 磁相移放置的两个线性霍尔传感器也可用作正弦余弦角度传感器。α 角由 SIN 与 COS 反正切计算得出。
了解详细信息
- MLX90290, 高速预编程线性霍尔传感器芯片,成比例模拟输出
- 全部 Melexis 线性霍尔芯片
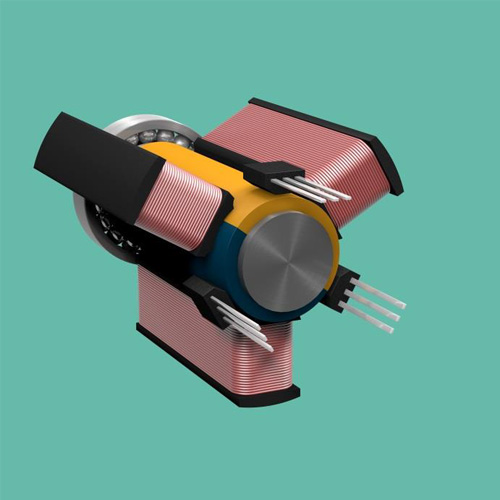
图 8:采用 3 个传感器的配置
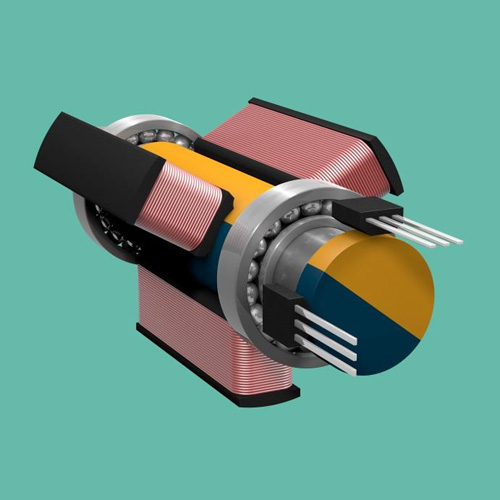
图 9:采用 2 个传感器的配置
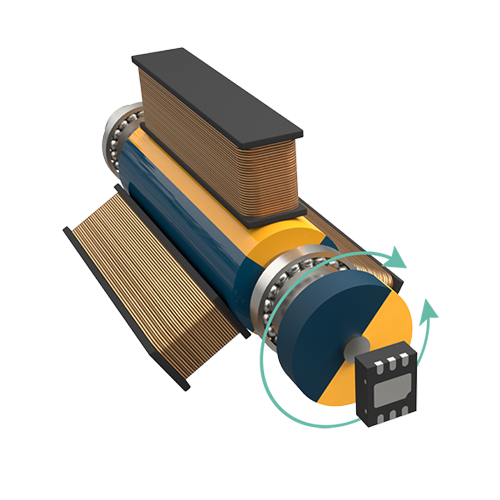
由磁性角度编码器控制的电机换向
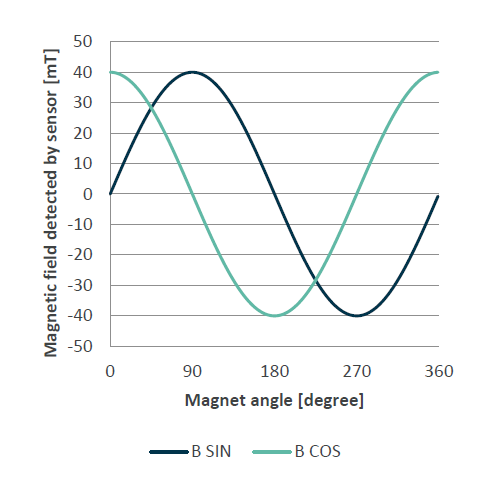
磁性角度编码器,也称为角度编码器或电机角度编码器,是提供成比例模拟正余弦输出的快速芯片解决方案。这些输出代表转子磁通量,因此可用于检测电机位置。最新一代产品可以放在轴上(轴端)或轴外(轴通)。
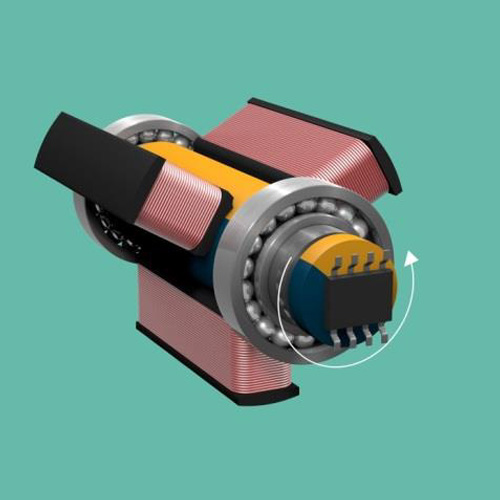
图 10:轴端
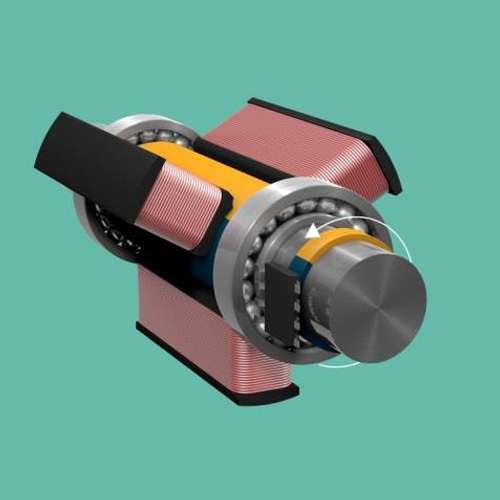
图 11:轴通
Triaxis® 角度编码器提供了一种 X-Y-Z 磁轴配置。此功能大大提高了传感器定位相对于磁体(转子或感应磁体)定位的灵活性。
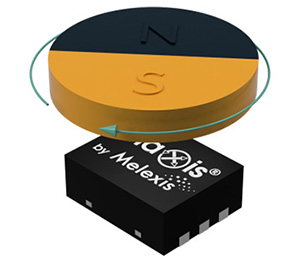
X/Y 磁轴
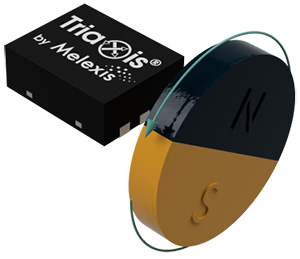
X/Z 磁轴
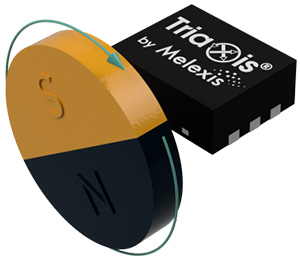
Y/Z 磁轴
传感器的 OUT1 和 OUT2(正弦和余弦信号)可配置为 X/Y 磁轴、X/Z 磁轴或 Z/Y 磁轴,用于轴端或轴通感应。
了解详细信息
- MLX90380,Triaxis® 角度编码器,360 度,两路成比例模拟输出,高速
- MLX90381,Triaxis® 微型角度编码器,360 度,两路成比例模拟输出,高速
- 磁性位置传感器选型指南
定位用传感器芯片
某些电机应用会额外配备用于定位的控制回路。例如,执行器低速运行的阀门。或者当应用中的内部齿轮箱将高速/低转矩旋转转换为低速/高转矩旋转时。由于齿轮箱的不断磨损,转子位置与电机输出轴之间的一一对应关系会逐渐消失。因此,在某些设计中,输出轴上额外配备了一个位置传感器。
| 应用定位(低速) | 原始信息(嵌入式) | 计算角度(独立式) |
| 结合电机换向 | 锁存器/开关 | |
| 角度编码器 | ||
| 线性霍尔传感器 | ||
| 特定性能 | Triaxis 价值优化(磁力计) | Triaxis 主流系列 (MLX9042x) |
| 高性能 | Triaxis 性能系列 (MLX9037x) |
上述电机换向产品非常注重高速性能。它们的更新频率以几微秒来表示,通常输出原始信息。然后由相关的 MCU 处理此信息。对于应用定位,快速响应不再是关注重点。因此,我们可以使用能输出已计算角度信息的“更智能”的传感器。这类传感器在 DSP 助力下,可提供更多功能(信号补偿、可编程诊断...),从而能进一步简化系统设计。Melexis 提供各种低速角位置传感器芯片。Melexis 产品中的低速指更新频率不低于 200µs。
了解详细信息
- MLX90392/MLX90393/MLX90395/MLX90397(价值优化),需进行后处理的磁力计。适用于消费类应用或汽车应用。
- MLX9042x(主流系列)磁性位置传感器芯片,适用于注重成本但要求严苛的应用。
- MLX9037x(性能系列)具备高性能、高安全性且功能全面的磁性位置传感器芯片。
- 磁性位置传感器选型指南 - 适合汽车和工业领域的 Triaxis® 产品
- 磁性位置传感器选型指南 - 适合电动车、智能家电、家居、工业和医疗领域的 Triaxis® 产品
适用于执行器的驱动芯片
Melexis 的全集成 LIN 电机驱动芯片和预驱动芯片可降低 BoM 成本,简化汽车机电一体化应用中电机控制翼板、阀门、风扇和泵的设计。这些装置还可用于机器人系统和电动自行车/电动踏板车。
支持两线直流电机、三线直流无刷电机或四线双极步进电机,可以使用带传感器或无传感器的磁场定向控制 (FOC) 算法。
对于带传感器的应用,Melexis 一站式为您提供传感与驱动解决方案。 绝对角度位置传感器芯片可与 Melexis 的驱动芯片搭配使用,以驱动和感应智能阀的位置,从而有效冷却电池或发动机。还可兼容 Melexis 的预驱动芯片,用于跟踪智能泵中的转子位置,从而以正确的转矩实现泵的高效和动态控制。我们的第三代嵌入式驱动芯片系列包括
- 适用于 1..10 W 应用的 MLX81330 和 MLX81332 LIN 驱动芯片
- 适用于 10..2000 W 应用的 MLX81340、MLX81344 和 MLX81346 LIN 预驱动芯片
值得一提的是,Melexis 凭借 MLX81346 成为将全集成片上系统 (SoC) 48 V 预驱动芯片推向市场的先驱企业。
了解详细信息
- LIN 电机驱动器 (电流 < 1 A)
- LIN 电机预驱动器(电流 > 1 A)
- 智能 LIN 电机驱动器选型指南

概念总结
详细信息请参见应用笔记(第 5 章)
以下为概念总结
| 系统 | 锁存器/开关 | 线性霍尔传感器 | 角度编码器 |
 |
 |
 |
|
| 概念 | 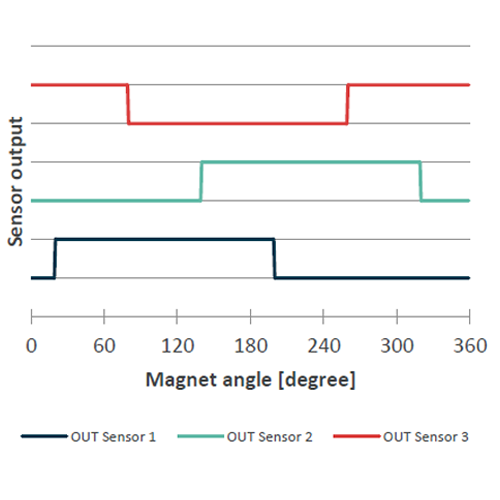 |
 |
 |
| 3 个用于三相系统的锁存器(60° 放置) 根据占空比 (DC) 运行 |
2 个线性传感器(90° 放置) 生成正弦和余弦输出 |
1 个角度编码器 生成正弦和余弦输出 |
|
| 优点 | - 成本 | - 高分辨率 - 检测电机换向点 |
- 高分辨率 - 可实现绝对位置控制(例如,二极磁铁即可满足) - 可检测轴端位置 |
| 缺点 | - 低分辨率 - 配备多个传感器 (x3),表明: * 关键定位 * 零件间存在差异,需要最终补偿 |
- 配备多个传感器 (x2),表明: * 关键定位 * 零件间存在差异,需要最终补偿 |
- 成本 |
结论
借助位置传感器的支持,电机驱动器可满足与位置、转矩和速度控制相关的特定应用要求。 Melexis 传感与驱动解决方案是优化您的机电一体化应用的理想选择。
Downloads
- Application note for sensors for motor control feedback loops
- Latch & Switch selection guide
- Triaxis® position sensors selection guide for automotive and industrial applications
- Triaxis® position sensors for e-mobility, smart appliance, home, industrial and medical selection guide
- Smart LIN embedded driver selection guide





















































